


About GTF Omni Wheel plus
GTFROBOTS Omni Directional Wheels are Omni Wheels made of a steel body surrounded with several steel or brass rollers around it which make the wheel move in all directions. These Omni Wheels are available in two different diameter sizes and are now provided with both steel rollers and brass rollers.To connect a motor to a wheel you have two options, the first one is to directly connect the motor to the wheel using a shaft and the second one is using a gear to connect the motor indirectly to the Omni Wheel. GTFROBOTS have designed a new Omni Directional Wheel named Omni Gear Plus wheel to help you connect the wheels indirectly to the Motor which has several advantages over the other connection methods.
A short introduction to Omni Gear Plus wheel
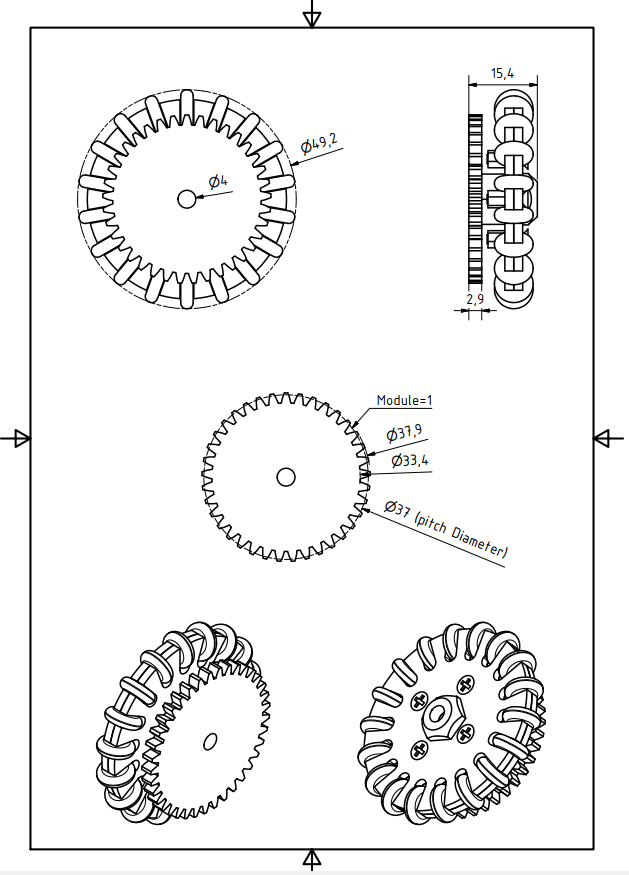
GTFROBOTS Omni Gear Plus wheel is a 50 mm Omni directional wheel which has a gear mounted on it.The steel gear has 37 teeth on it. It’s outer diameter size is 37.9mm and the Pitch Diameter size is 37mm. (you can see the drawing here as well). The module size is 1mm and the width of this gear wheel is 2.9mm.There are several advantages and some disadvantages in using this kind of new Omni Wheels.
Advantages in using Omni Gear Plus
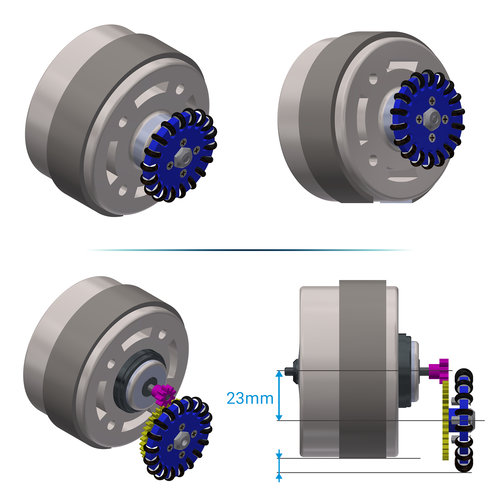
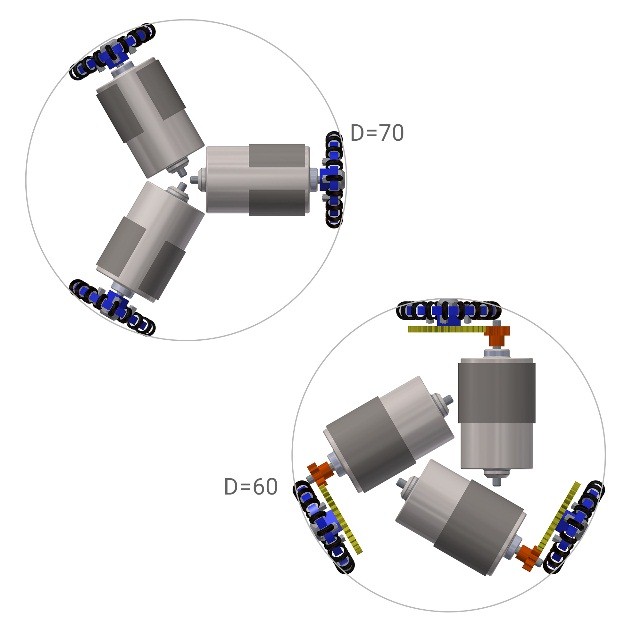
- GTFROBOTS Omni Wheels which are mostly used for Small Size league RoboCup competitions, must be small in diameters. If the motor has larger radius than the wheel, then your Robot wheels won’t reach the ground. In order to solve this problem, you can either use a smaller motor (but you usually can’t find it) or change the motor position and therefore you have to use a gear to put the motor in a higher position. As you can see in the photo, the motor is connected to a small gear and the power is transferred to the Omni Wheel through the two gears.
- Sometimes it is difficult to find a motor with the motor speed you want, by using this gear system robot you can change the speed of the motor. In this gear wheel, the speed of the motor is reduced based on the inverse ratio of the numbers of teeth on bigger gear to the numbers of the teeth on smaller gear. For example, if the speed of your motor is 400 RPM and you use a 10 teeth small gear along with GTFROBOTS Omni Gear Wheel, then the speed of the motor will reduce as follow: Final Speed =10/37=3.7 400/3.7
- The motor length can be the next limitation, you can overcome this limitation and use motors with longer body or longer shafts easily using Omni Gear Wheels. You can see the difference in the following pictures, in the first picture the motor is directly connected to the Omni Wheel while in the second photo there is more space for using longer motors because The omni gear wheel has been used in its structure.
- Another point is that, as we connect the motor directly to the wheels, the motor must bear the whole weight of the Robot. This is not a professional way of connecting the parts, so as you use GTFROBOTS new Wheels the motor does not bear the weight, but the Robot Structure does.
- Usually in a gearbox there are several gears working together. The smaller gears must be closer to the motor in order to reduce the robot speed, so we can have more control over the robot. But the bigger ones can be used in the last stage of the robot design. Using GTFROBOTS Omni Gear Wheel lets you use a big gear as the last stage of your system.
- A good gear is made of good materials, it must have a big module size and width size. The gear which is used in our Omni Gear Wheel is made of steel which makes it so adamant, the module size is 1mm, and the width is 3mm. All these points make this wheel one of the best options for your robot.
Disadvantages in using Omni Gear Plus
- Designing the Robots using simple Omni Wheels is much easier since the motor is connected to the wheel directly, but for this new system you will need a more complicated design.
- For designing the robot with Omni gear wheel, the measurements must be so accurate, for example, if the two gears are so close to each other in gear design, they will stick to each other and not move. If the space between the two gears is more than what is needed, then the power won’t be transferred from one gear to the other properly and the whole system won’t have a great outcome or it’s even possible that the gears will break.
- Because of using gears, the whole system will make more noise.
- There will be some vibrations and backlash in the whole system and among the gears.
- You need to pay more money for this kind of Omni Gear Wheels, compared to the simple model.
These New Omni Gear Wheels are highly recommended for professional teams who want to design more advanced Robots. Buy Omni wheel Plus Now!.