

18Mar
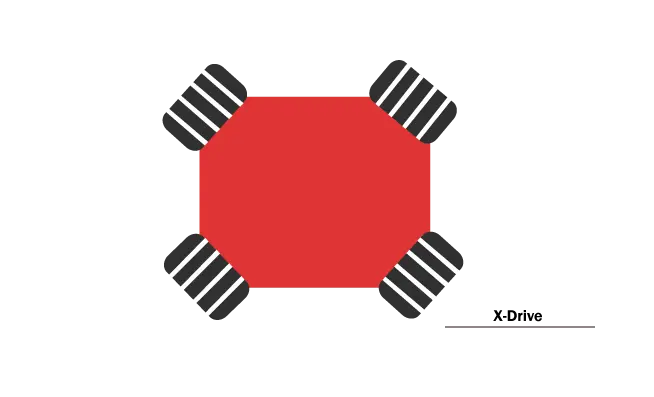
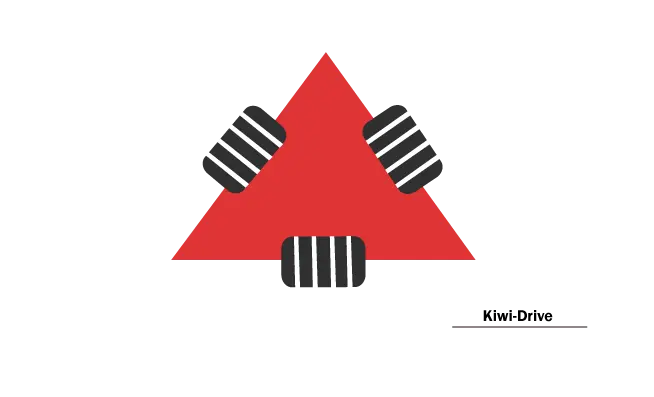
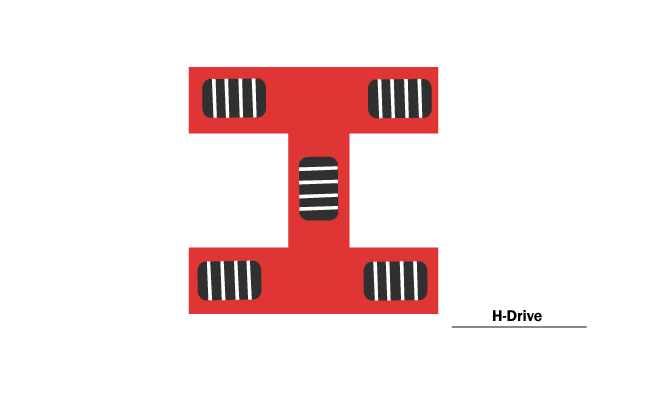
A Brief Guide to Holonomic Drivetrains
Industrial Omni wheels: applications and uses Omni directional wheels have lots of applications. In addition to the robotic fields such as... read more
For many years, robot wheels have evolved to be more efficient, satisfy specific requirements and be used in more complex... read more
The size of the wheels you use can significantly affect your robot's performance. In this guide, we will take a... read more


Leave a Reply